探索 Cartographer 在多机器人导航领域的可能性
Cartographer 作为一款先进的地图构建和定位算法,在机器人导航领域备受关注,它能否处理多机器人导航这一复杂的任务呢?
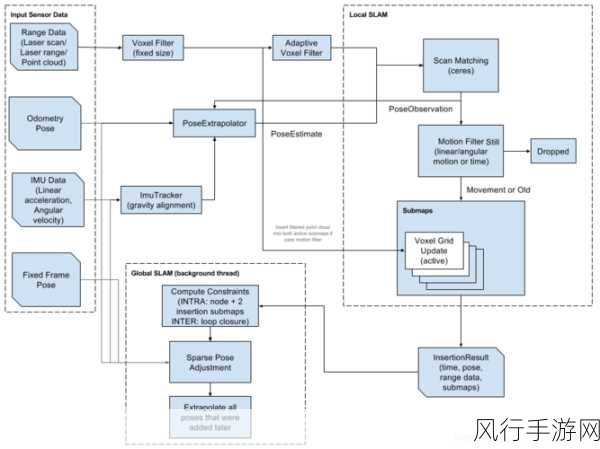
要回答这个问题,我们需要先深入了解 Cartographer 的工作原理和特点,Cartographer 主要通过融合多种传感器的数据,如激光雷达、惯性测量单元等,来构建高精度的地图,并实现机器人的实时定位,其算法的高效性和准确性在单机器人导航中已经得到了充分的验证。

多机器人导航与单机器人导航存在显著的差异,在多机器人场景中,机器人之间需要进行有效的通信和协作,以避免碰撞、优化路径规划,并共同完成复杂的任务,这就对地图共享、信息融合和协同决策等方面提出了更高的要求。
Cartographer 在处理多机器人导航时,面临着一些挑战,多个机器人同时工作时产生的大量数据如何快速有效地处理和融合,以保证地图的一致性和准确性,不同机器人的初始位置、运动速度和任务目标的差异,也增加了路径规划和协同的难度。
但这并不意味着 Cartographer 无法应对多机器人导航的需求,通过一些改进和扩展,Cartographer 具有很大的潜力,一种可能的解决方案是优化数据处理和通信机制,使多个机器人能够实时共享地图信息和自身状态,可以引入分布式计算的思想,将计算任务分配到各个机器人上,提高整体的运算效率。
结合其他的算法和技术,如强化学习、群体智能等,也能够增强 Cartographer 在多机器人导航中的表现,通过让机器人在模拟环境中学习协作策略,或者利用群体智能的方法来优化路径规划,可以更好地发挥多机器人系统的优势。
虽然 Cartographer 在处理多机器人导航方面还存在一些问题需要解决,但凭借其强大的基础算法和不断的创新改进,未来在多机器人导航领域有望取得更加出色的成果,我们期待着看到 Cartographer 为多机器人协同工作带来更高效、更智能的导航解决方案,推动机器人技术在更广泛的领域得到应用和发展。